[视频作者] 旁白logic
[视频时长] 5:20
#学习# [视频类型] 日常
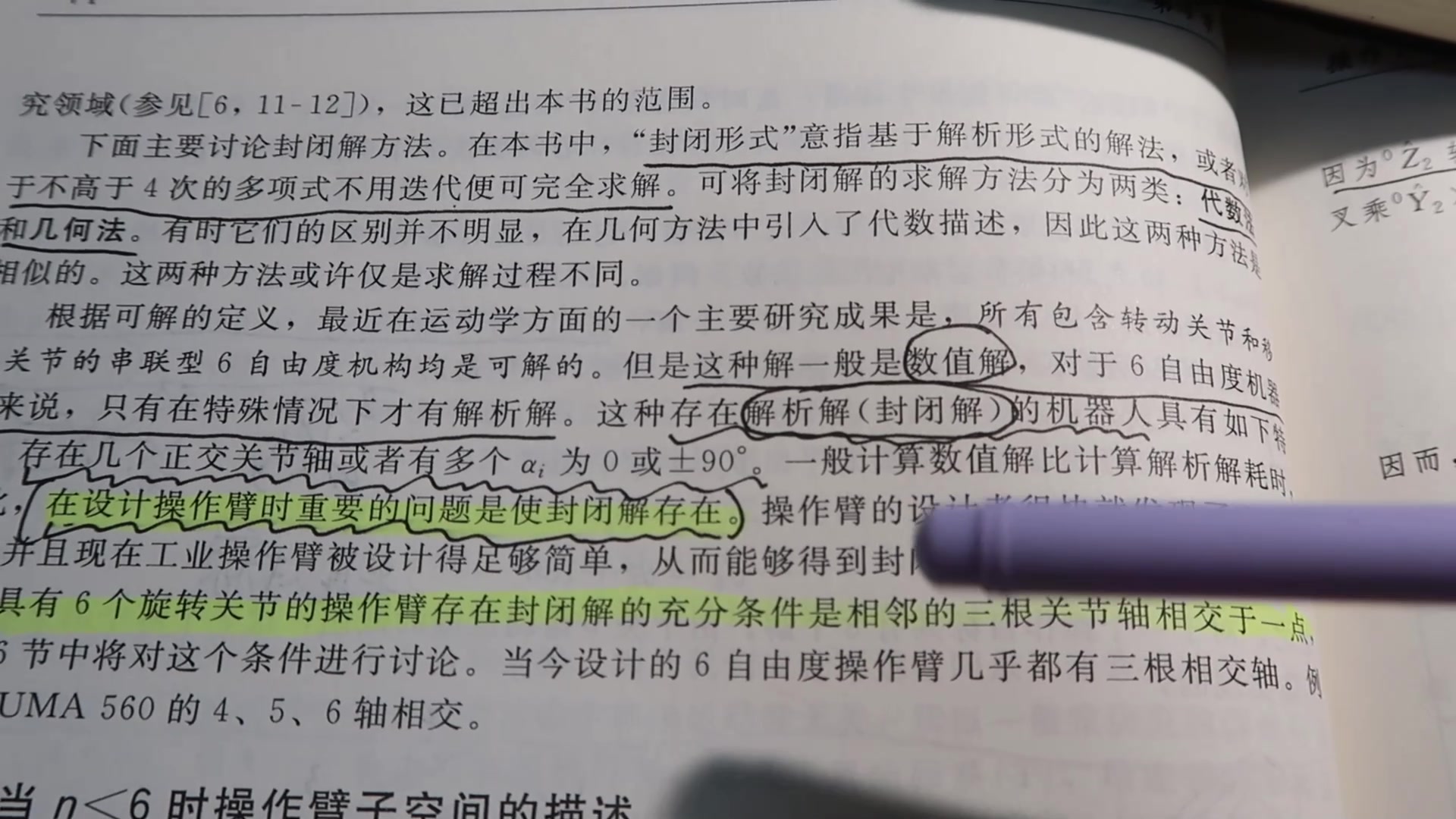
第四章操作臂逆运动学 -逆运动学有多解问题,以及加权求解最优解(比如最近解,通过加权主要移动小连杆而不是大连杆得到) -“封闭形式”:基于解析形式的解法,对不高于四次的多项式不用迭代方法进行完全求解。 -pieper解法:为了使封闭解存在,工业操作臂要要被设计简单,也就是六自由度机械臂腕关节三根关节轴相交于一点。一般应用于商业化的机器人中。 -灵巧空间和可达空间(灵巧空间,可从各个方向到达的区域,可达空间可至少从一个方向到达的区域) -对于逆运动学问题,Atan2查表法子程序可被用于提高计算速度
机器人学导论-第四章操作臂逆运动学
以上内容由小不点搜索引擎从网站www.bilibili.com自动化索引镜像而来,不代表网站的即时内容,也无法确保其有效性;仅限个人学习使用,禁止商用。如有任何异议,请使用举报删除
影音视频访问链接
以下链接为影音视频“机器人学导论-第四章操作臂逆运动学”在线访问地址,点击链接就可以访问查看啦
www.bilibili.com
search
search
search
search
search
search
search
search
search
search